Tablets und Smartphones im Cockpit
03.02.16 21:18 Ausbildung
Mit meinem heutigen Blogbeitrag möchte ich die Awareness bei Einsatz von GPS basierten Tablets und Smartphones im Cockpit wecken. Denn erst wenn Schwächen und Grenzen bekannt sind, können diese als Hilfsmittel auch sinnvoll eingesetzt werden.
Beginnen möchte ich mit den GPS Grundlagen, stelle die typischen Fehlerquellen der Positionsbestimmung vor, um zuletzt auf den Einsatz im Cockpit einzugehen. Viel Spaß beim Lesen und konstruktive Kritik ist jederzeit willkommen!
Funktionsweise GPS
Das Grundprinzip von GPS ist das Messen von Zeit. 24 Satelliten kreisen um die Erde und senden im Prinzip folgende Informationen:
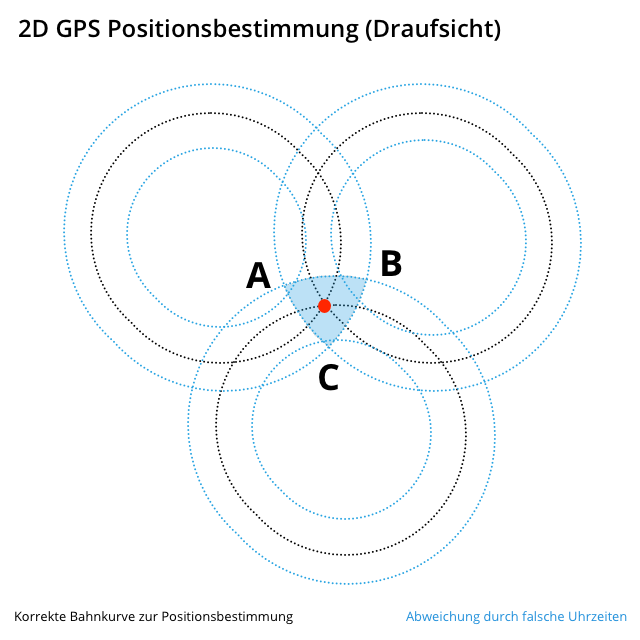
Der Rest ist Mathematik und Informationsverarbeitung: Ein GPS Empfänger auf der Erdoberfläche empfängt diese Signale mit einer zeitlichen Verzögerung. Die Kenntnis dieser Laufzeiten von mindestens 3 Satelliten reicht aus, um eine Position auf der Erdoberfläche zu berechnen (2D Position Fix). Wie die Zeichnung zeigt, reichen theoretisch bereits 2 Satelliten - ein Dritter wird jedoch zum Abgleich der genauen Uhrzeit zwingend benötigt. Denn Messungenauigkeiten von einer Mikrosekunde können im Ergebnis zu einem Ortsfehler von 300 Metern führen.
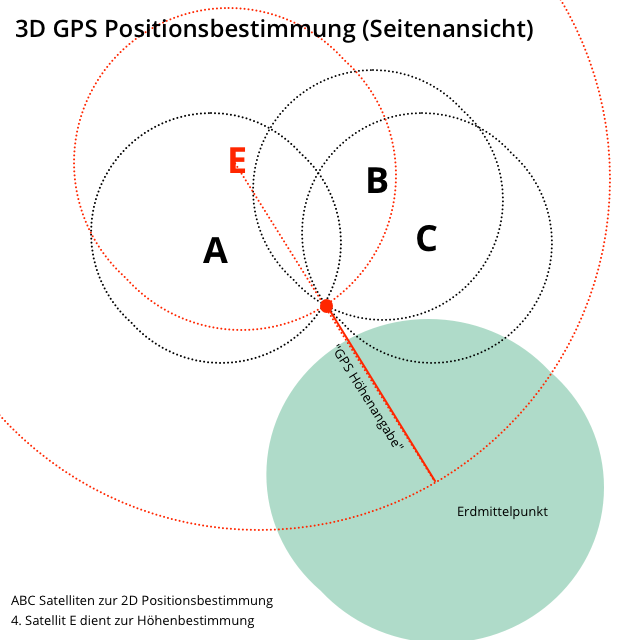
Ist zusätzlich die Höhe zu ermitteln so bedarf es eines vierten Satelliten. Mit Hilfe dessen Positionsangaben wird die Entfernung zum Erdmittelpunkt berechnet (3D Position Fix). Stehen mehr als 4 Satelliten zur Verfügung, so werden dessen Bahndaten ebenfalls hinzugezogen. Soweit die grobe Theorie.
Fehlerquellen
In der Praxis bestehen jedoch zahlreiche Fehlermöglichkeiten. Da sind zuerst atmosphärische Störungen zu nennen. Und wer im Schulunterricht in Physik aufgepasst hat, der kann sich vielleicht noch an Lichtbrechung und Brechungsindex in unterschiedlichen Medien erinnern. Ähnlich sieht es mit den GPS Funksignalen aus. Gerade an den Übergangsbereichen zwischen Weltall und Ionosphäre bzw. weiter tiefer in der Troposphäre. Die Signale werden mehrfach durch die unterschiedlich dichten Luftschichten abgelenkt und gebrochen. Können die ionosphärischen Ablenkungen durch Algorithmen noch gut weggerechnet werden, so ist das das für bestimmte Wetterlagen in der Troposphäre leider nicht mehr möglich. Hier sorgen unterschiedliche Wasserdampfkonzentrationen zu Laufzeitverlängerungen der Signale.
Ein weiterer Faktor ist die Satellitengeometrie. Wenn für einen Empfänger die Satelliten „übereinander“ in eine Himmelsrichtung liegen, erschwert das die Lateration. Stehen die Satelliten nur knapp über der Horizontlinie führt das ebenfalls zu einer ungünstigen Satellitengeometrie und in Folge zur ungenauen Position. Hoch über einem Empfänger stehende Satelliten in unterschiedlichen Richtungen sind hingegen ideal.
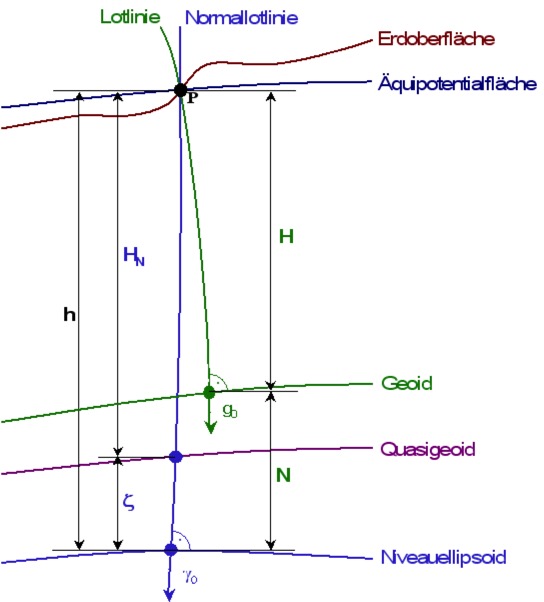
Die für die Luftfahrt jedoch schwerwiegendste systembedingte Ungenauigkeit ist die Höhenbestimmung. Das für GPS zugrunde liegende Referenzsystem WGS84 ist zwar recht genau und beschreibt die Erde mitsamt Ihrer Unregelmäßigkeiten im Schwerefeld als Geoid. Mathematisch wird aber die Erdoberfläche jedoch über Ellipsenfunktionen berechnet (Ellipsoidische Höhe) und mit Hilfe von Geoidinformationen, die als Raster im Gerät eingespeichert sind, auf die jeweils aktuelle Position interpoliert. Kurzum: Die Höhe der Erdoberfläche ist zwar mathematisch genau berechnet, am Ende aber trotzdem ungenau. Die Höhenunterschiede können je nach Region um mehrere hundert Meter falsch sein.
Eine weitere Fehlerquelle liegt in den Schwankungen der Satellitenumlaufbahnen. Von Zeit zu Zeit müssen diese korrigiert werden. Und nach solchen Korrekturen bedarf es noch einige Zeit, bis die Umlaufbahnen wieder für längere Zeit stabil sind. Daher verfügen die übermittelten Satellitenpositionen (Ephemeriden- und Almanach-Daten) eine recht kurze Gültigkeitsdauer von nur 4 Stunden. Ein GPS Empfänger braucht diese Positionsangaben zur genauen Zeitmessung. Liegen diese nicht vor, so werden diese aus den „Live-Daten“ ermittelt. Das kann bei einem Cold Start bis zu 12,5 Minuten dauern.
Hier helfen „autonomous GPS“ oder „self-assisted GPS“ Systeme weiter, welche die Bahndaten für mehrere Tage oder Wochen im voraus berechnen und abspeichern. Bei Neustart kann für den Benutzer die systembedingte Wartezeit so überbrückt werden. Doch kann ein Satellit in der Zwischenzeit seine Bahn geringfügig verändert haben. Erkennbar wird dieses in einem deutlichen wahrnehmbaren Sprung oder Versatz im Navigationsgerät sobald das Gerät nach einer gewissen Laufzeit wieder Live-Daten hat.
Moderne „assisted GPS“ (A-GPS) Systeme gehen einen anderen Weg und erhalten diese Positionsdaten durch Abgleich mit Mobilfunkzellen und/ oder aus dem Internet. Die Zeit zum Abgleichen nach dem Einschalten (TTFF = Time To First Fix) wird so auf wenige Sekunden verringert und verschafft zudem in Gegenden mit starken Signalreflexionen (Mehrwegeeffekt) z.B. in Großstädten einen Genauigkeitsvorteil. In Kombination mit WLAN, Funkzellen, Lagesensoren und anderen teilweise herstellerspezifischen Systemen (z.B. Apple iBeacons) kann auch eine Ortung ohne GPS unter der Erde, in Gebäuden oder vor bestimmten Regalen in Ladengeschäften erfolgen.
Zuletzt kommt der Faktor Geschwindigkeit zum Tragen. Je schneller sich ein GPS Empfänger im Raum bewegt, desto ungenauer wird seine Position. Intelligente Algorithmen und „Fixes“ können in Abhängigkeit des Richtungsvektors die Position zwar „nachziehen“. Stoppt die Bewegung, verändert sich die Geschwindigkeit oder erfolgt ein rascher Richtungswechsel, so kommt diese Art von Fehlerkorrektur aus dem Tritt. Eine Latenz der Positionsbestimmung von wenigen Sekunden übertragen auf eine Reisegeschwindigkeit von 200 km/h ergibt rechnerisch einen Versatz von mindestens 160-200 Meter.
Professionelle Anwendungen greifen aufgrund der genannten Fehlerquellen und Ungenauigkeiten auf ortsfeste „differential GPS“ Stationen (DGPS) zurück, die eine Positionsbestimmung bis auf wenige Zentimeter ermöglichen. Hier existieren unterschiedliche Systeme wie beispielsweise EGNOS in Europa, WAAS in den USA und SOPOS in Deutschland. Die Funktionsweise ist bei allen ähnlich: Bodenbasierte Stationen ergänzen die Positions- und Höhenbestimmung mit Korrektursignalen. Die Decision Height - die Entscheidungshöhe ob ein Anflug fortgesetzt oder abgebrochen wird - beträgt bei EGNOS seit Oktober 2015 bei nur 200 Fuß und ist vergleichbar mit konventionellen CAT I Approaches. Die besseren und teuren GPS Geräte - beispielsweise von GARMIN - können diese interpretieren, viele günstig hergestellte Tablets und Smartphones nicht.
Als Softwareentwickler haben mich natürlich die GPS Algorithmen interessiert, die erstaunlich gut dokumentiert und relativ offen im Netz zugänglich sind. Doch nach einem Blick in die Low-Level Unterlagen habe ich diese doch zur Seite gelegt und bin froh, auf einer mehr abstrakten Ebene auf API Schnittstellen von Betriebssystemen zurückgreifen zu können. Das Abfragen externer GPS Mäuse erfolgt meist über das standardisierte NMEA-0183 Protokoll, welches ebenfalls sehr gut dokumentiert und einfach in eigene Apps einzubinden ist. Experimentierfreudige Anwender können mit der sehr guten und kostenlosen Software GNavigia/Gina herumspielen.
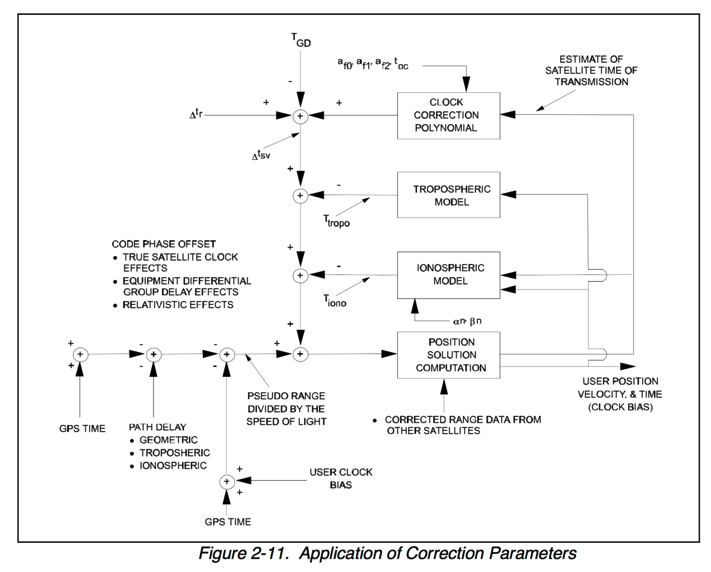
Nachfolgend zur Verdeutlichung ein Schaubild zur Positionsbestimmung mit den zahlreichen Software Korrektur-Fixes zur Positionsbestimmung:
GPS im Cockpit
Doch zurück ins Cockpit. Digitale Helferlein sind im Cockpit nicht pauschal schlecht. Und ich persönlich mag auf ein fest eingebautes Skymap und mein im Kniebrett mitlaufendes Jeppesen als Backup nicht mehr verzichten. Doch mit einem einfachen Tablet „ins Panel hängen“ und damit losfliegen ist es leider nicht getan. Was bei Ausfall des Systems passieren kann, habe ich im letzten Jahr im Blogbeitrag „Lessons to learn“ deutlich gemacht.
Doch genau dieser Eindruck entsteht leider bei so manchen Apps. Und in einigen selbstgebauten Panels in UL Foren oder Social Media kann man genau solche „EFIS für Arme“ entdecken. Ein handelsübliches Tablet wird im Einbaurahmen einfach ins Panel gehängt. Die zugrundeliegenden Apps wie beispielsweise das Air Nav Pro sind nicht nur kostengünstig und funktionsstark, sondern bieten extra dafür auch eine EFIS Ansicht mit „Synthetic Vision“ des Terrains inklusive ICAO Kartenmaterial und DFS Anflugcharts.

Ein Blick in das Air Nav Pro Benutzerhandbuch ist schnell ernüchternd:
Barometrische Höhenmessung
Erinnern wir uns an den Theorieunterricht. Neben der Höhe sind Temperatur und Luftfeuchtigkeit maßgebliche Faktoren einer korrekten barometrischen Höhenmessung der „wahren“ Höhe (engl.:True Altitude). Doch woher soll ein Tablet den aktuellen Luftdruck beziehen? Ein Beispiel:
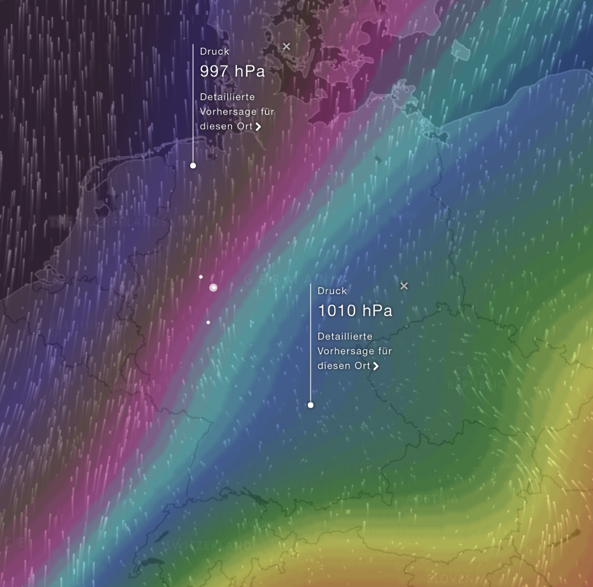
Wer an diesem Tag quer durch Deutschland fliegt, der muß einen Druckunterschied von 13 hPa berücksichtigen. Wehe denen, die Ihre Höhenmesser nicht nachstellen oder bei marginalen Sichten und Flügen „on top“ Ihr Leben ohne Systemkenntnisse einem GPS „Flächennavigationsgerät“ anvertrauen.
Ein Berg oder ein Bodenhindernis könnte gerade bei kalter Luft im Winter deutlich näher sein als gedacht.

Im Grunde können alle GPS basierten Geräte ohne Luftdruckmessung weder Geschwindigkeiten noch eine Flughöhe korrekt wiedergeben. Selbst Richtung und Steuerkurs können erst durch den Dopplereffekt aus einer Bewegung im Raum ermittelt werden. Ein ruhendes GPS Gerät „weiß“ daher nie, in welche Richtung es gerade orientiert ist.
Erst durch Einsatz von externen GPS Mäusen oder sogenannten AHRS Boxen wie zum Beispiel die von iLevil mit Anschluß an das Pitot-Static System wird dieser Umstand behoben. Viele Glascockpits greifen beispielsweise auf diese externen Lösungen zurück.
Häufig wird der analoge Höhenmesser in ULs mit modernen EFIS Glascockpits als Backup betrachtet und dementsprechend schnell übersehen oder schlichtweg nicht eingestellt. Im Grunde ist es genau umgekehrt: Die kleinen Rundinstrumente für Geschwindigkeit und Höhe irgendwo in der Ecke eines Panels sind die Hauptinstrumente. Der große, bunte Bildschirm in der Mitte nur das Goodie.
Denkt bitte an die genannten Unzulänglichkeiten, wenn Ihr mit Tablet oder Smartphone im Flieger unterwegs seid damit Euch solche „Denkpannen“ erspart bleiben.
In diesem Sinne,
Euer Tomas Jakobs
UPDATE 17.02.2016: Zu diesem Beitrag gibt es hier einen Teil II
Beginnen möchte ich mit den GPS Grundlagen, stelle die typischen Fehlerquellen der Positionsbestimmung vor, um zuletzt auf den Einsatz im Cockpit einzugehen. Viel Spaß beim Lesen und konstruktive Kritik ist jederzeit willkommen!
Funktionsweise GPS
Das Grundprinzip von GPS ist das Messen von Zeit. 24 Satelliten kreisen um die Erde und senden im Prinzip folgende Informationen:
- Name des Satelliten
- Genaue Position des Satelliten
- Genaue Uhrzeit der Nachricht
Der Rest ist Mathematik und Informationsverarbeitung: Ein GPS Empfänger auf der Erdoberfläche empfängt diese Signale mit einer zeitlichen Verzögerung. Die Kenntnis dieser Laufzeiten von mindestens 3 Satelliten reicht aus, um eine Position auf der Erdoberfläche zu berechnen (2D Position Fix). Wie die Zeichnung zeigt, reichen theoretisch bereits 2 Satelliten - ein Dritter wird jedoch zum Abgleich der genauen Uhrzeit zwingend benötigt. Denn Messungenauigkeiten von einer Mikrosekunde können im Ergebnis zu einem Ortsfehler von 300 Metern führen.
Ist zusätzlich die Höhe zu ermitteln so bedarf es eines vierten Satelliten. Mit Hilfe dessen Positionsangaben wird die Entfernung zum Erdmittelpunkt berechnet (3D Position Fix). Stehen mehr als 4 Satelliten zur Verfügung, so werden dessen Bahndaten ebenfalls hinzugezogen. Soweit die grobe Theorie.
Fehlerquellen
In der Praxis bestehen jedoch zahlreiche Fehlermöglichkeiten. Da sind zuerst atmosphärische Störungen zu nennen. Und wer im Schulunterricht in Physik aufgepasst hat, der kann sich vielleicht noch an Lichtbrechung und Brechungsindex in unterschiedlichen Medien erinnern. Ähnlich sieht es mit den GPS Funksignalen aus. Gerade an den Übergangsbereichen zwischen Weltall und Ionosphäre bzw. weiter tiefer in der Troposphäre. Die Signale werden mehrfach durch die unterschiedlich dichten Luftschichten abgelenkt und gebrochen. Können die ionosphärischen Ablenkungen durch Algorithmen noch gut weggerechnet werden, so ist das das für bestimmte Wetterlagen in der Troposphäre leider nicht mehr möglich. Hier sorgen unterschiedliche Wasserdampfkonzentrationen zu Laufzeitverlängerungen der Signale.
Ein weiterer Faktor ist die Satellitengeometrie. Wenn für einen Empfänger die Satelliten „übereinander“ in eine Himmelsrichtung liegen, erschwert das die Lateration. Stehen die Satelliten nur knapp über der Horizontlinie führt das ebenfalls zu einer ungünstigen Satellitengeometrie und in Folge zur ungenauen Position. Hoch über einem Empfänger stehende Satelliten in unterschiedlichen Richtungen sind hingegen ideal.
Die für die Luftfahrt jedoch schwerwiegendste systembedingte Ungenauigkeit ist die Höhenbestimmung. Das für GPS zugrunde liegende Referenzsystem WGS84 ist zwar recht genau und beschreibt die Erde mitsamt Ihrer Unregelmäßigkeiten im Schwerefeld als Geoid. Mathematisch wird aber die Erdoberfläche jedoch über Ellipsenfunktionen berechnet (Ellipsoidische Höhe) und mit Hilfe von Geoidinformationen, die als Raster im Gerät eingespeichert sind, auf die jeweils aktuelle Position interpoliert. Kurzum: Die Höhe der Erdoberfläche ist zwar mathematisch genau berechnet, am Ende aber trotzdem ungenau. Die Höhenunterschiede können je nach Region um mehrere hundert Meter falsch sein.
Eine weitere Fehlerquelle liegt in den Schwankungen der Satellitenumlaufbahnen. Von Zeit zu Zeit müssen diese korrigiert werden. Und nach solchen Korrekturen bedarf es noch einige Zeit, bis die Umlaufbahnen wieder für längere Zeit stabil sind. Daher verfügen die übermittelten Satellitenpositionen (Ephemeriden- und Almanach-Daten) eine recht kurze Gültigkeitsdauer von nur 4 Stunden. Ein GPS Empfänger braucht diese Positionsangaben zur genauen Zeitmessung. Liegen diese nicht vor, so werden diese aus den „Live-Daten“ ermittelt. Das kann bei einem Cold Start bis zu 12,5 Minuten dauern.
Hier helfen „autonomous GPS“ oder „self-assisted GPS“ Systeme weiter, welche die Bahndaten für mehrere Tage oder Wochen im voraus berechnen und abspeichern. Bei Neustart kann für den Benutzer die systembedingte Wartezeit so überbrückt werden. Doch kann ein Satellit in der Zwischenzeit seine Bahn geringfügig verändert haben. Erkennbar wird dieses in einem deutlichen wahrnehmbaren Sprung oder Versatz im Navigationsgerät sobald das Gerät nach einer gewissen Laufzeit wieder Live-Daten hat.
Moderne „assisted GPS“ (A-GPS) Systeme gehen einen anderen Weg und erhalten diese Positionsdaten durch Abgleich mit Mobilfunkzellen und/ oder aus dem Internet. Die Zeit zum Abgleichen nach dem Einschalten (TTFF = Time To First Fix) wird so auf wenige Sekunden verringert und verschafft zudem in Gegenden mit starken Signalreflexionen (Mehrwegeeffekt) z.B. in Großstädten einen Genauigkeitsvorteil. In Kombination mit WLAN, Funkzellen, Lagesensoren und anderen teilweise herstellerspezifischen Systemen (z.B. Apple iBeacons) kann auch eine Ortung ohne GPS unter der Erde, in Gebäuden oder vor bestimmten Regalen in Ladengeschäften erfolgen.
Zuletzt kommt der Faktor Geschwindigkeit zum Tragen. Je schneller sich ein GPS Empfänger im Raum bewegt, desto ungenauer wird seine Position. Intelligente Algorithmen und „Fixes“ können in Abhängigkeit des Richtungsvektors die Position zwar „nachziehen“. Stoppt die Bewegung, verändert sich die Geschwindigkeit oder erfolgt ein rascher Richtungswechsel, so kommt diese Art von Fehlerkorrektur aus dem Tritt. Eine Latenz der Positionsbestimmung von wenigen Sekunden übertragen auf eine Reisegeschwindigkeit von 200 km/h ergibt rechnerisch einen Versatz von mindestens 160-200 Meter.
Professionelle Anwendungen greifen aufgrund der genannten Fehlerquellen und Ungenauigkeiten auf ortsfeste „differential GPS“ Stationen (DGPS) zurück, die eine Positionsbestimmung bis auf wenige Zentimeter ermöglichen. Hier existieren unterschiedliche Systeme wie beispielsweise EGNOS in Europa, WAAS in den USA und SOPOS in Deutschland. Die Funktionsweise ist bei allen ähnlich: Bodenbasierte Stationen ergänzen die Positions- und Höhenbestimmung mit Korrektursignalen. Die Decision Height - die Entscheidungshöhe ob ein Anflug fortgesetzt oder abgebrochen wird - beträgt bei EGNOS seit Oktober 2015 bei nur 200 Fuß und ist vergleichbar mit konventionellen CAT I Approaches. Die besseren und teuren GPS Geräte - beispielsweise von GARMIN - können diese interpretieren, viele günstig hergestellte Tablets und Smartphones nicht.
Als Softwareentwickler haben mich natürlich die GPS Algorithmen interessiert, die erstaunlich gut dokumentiert und relativ offen im Netz zugänglich sind. Doch nach einem Blick in die Low-Level Unterlagen habe ich diese doch zur Seite gelegt und bin froh, auf einer mehr abstrakten Ebene auf API Schnittstellen von Betriebssystemen zurückgreifen zu können. Das Abfragen externer GPS Mäuse erfolgt meist über das standardisierte NMEA-0183 Protokoll, welches ebenfalls sehr gut dokumentiert und einfach in eigene Apps einzubinden ist. Experimentierfreudige Anwender können mit der sehr guten und kostenlosen Software GNavigia/Gina herumspielen.
Nachfolgend zur Verdeutlichung ein Schaubild zur Positionsbestimmung mit den zahlreichen Software Korrektur-Fixes zur Positionsbestimmung:
GPS im Cockpit
Doch zurück ins Cockpit. Digitale Helferlein sind im Cockpit nicht pauschal schlecht. Und ich persönlich mag auf ein fest eingebautes Skymap und mein im Kniebrett mitlaufendes Jeppesen als Backup nicht mehr verzichten. Doch mit einem einfachen Tablet „ins Panel hängen“ und damit losfliegen ist es leider nicht getan. Was bei Ausfall des Systems passieren kann, habe ich im letzten Jahr im Blogbeitrag „Lessons to learn“ deutlich gemacht.
Doch genau dieser Eindruck entsteht leider bei so manchen Apps. Und in einigen selbstgebauten Panels in UL Foren oder Social Media kann man genau solche „EFIS für Arme“ entdecken. Ein handelsübliches Tablet wird im Einbaurahmen einfach ins Panel gehängt. Die zugrundeliegenden Apps wie beispielsweise das Air Nav Pro sind nicht nur kostengünstig und funktionsstark, sondern bieten extra dafür auch eine EFIS Ansicht mit „Synthetic Vision“ des Terrains inklusive ICAO Kartenmaterial und DFS Anflugcharts.
Ein Blick in das Air Nav Pro Benutzerhandbuch ist schnell ernüchternd:
„Please note that even with a good GPS signal, the altitude as reported by the GPS may have an accuracy of +/- 200 ft. Elevation database may also contains some inaccuracies. You should always plan your flight with a reasonable margin over the obstacles.“
„The Altimeter of Air Navigation is GPS based like all nav instruments. Usually, the GPS has an acceptable precision. Nevertheless it should never be used as a replacement for the barometric altimeter.“
Barometrische Höhenmessung
Erinnern wir uns an den Theorieunterricht. Neben der Höhe sind Temperatur und Luftfeuchtigkeit maßgebliche Faktoren einer korrekten barometrischen Höhenmessung der „wahren“ Höhe (engl.:True Altitude). Doch woher soll ein Tablet den aktuellen Luftdruck beziehen? Ein Beispiel:
Wer an diesem Tag quer durch Deutschland fliegt, der muß einen Druckunterschied von 13 hPa berücksichtigen. Wehe denen, die Ihre Höhenmesser nicht nachstellen oder bei marginalen Sichten und Flügen „on top“ Ihr Leben ohne Systemkenntnisse einem GPS „Flächennavigationsgerät“ anvertrauen.
Ein Berg oder ein Bodenhindernis könnte gerade bei kalter Luft im Winter deutlich näher sein als gedacht.
Im Grunde können alle GPS basierten Geräte ohne Luftdruckmessung weder Geschwindigkeiten noch eine Flughöhe korrekt wiedergeben. Selbst Richtung und Steuerkurs können erst durch den Dopplereffekt aus einer Bewegung im Raum ermittelt werden. Ein ruhendes GPS Gerät „weiß“ daher nie, in welche Richtung es gerade orientiert ist.
Erst durch Einsatz von externen GPS Mäusen oder sogenannten AHRS Boxen wie zum Beispiel die von iLevil mit Anschluß an das Pitot-Static System wird dieser Umstand behoben. Viele Glascockpits greifen beispielsweise auf diese externen Lösungen zurück.
Häufig wird der analoge Höhenmesser in ULs mit modernen EFIS Glascockpits als Backup betrachtet und dementsprechend schnell übersehen oder schlichtweg nicht eingestellt. Im Grunde ist es genau umgekehrt: Die kleinen Rundinstrumente für Geschwindigkeit und Höhe irgendwo in der Ecke eines Panels sind die Hauptinstrumente. Der große, bunte Bildschirm in der Mitte nur das Goodie.
Denkt bitte an die genannten Unzulänglichkeiten, wenn Ihr mit Tablet oder Smartphone im Flieger unterwegs seid damit Euch solche „Denkpannen“ erspart bleiben.
In diesem Sinne,
Euer Tomas Jakobs
UPDATE 17.02.2016: Zu diesem Beitrag gibt es hier einen Teil II